

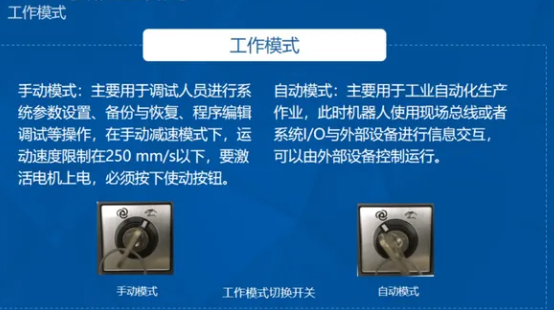
ABB机器人工作模式分为手动模式和自动模式两种。
手动模式:主要用于调试人员进行系统参数设置、备份与恢复、程序编辑调试等操作,在手动减速模式下,运动速度限制在 250 mm/s 以下,要激活电机上电,必须按下使动按钮。
自动模式:主要用于工业自动化生产作业,此时机器人使用现场总线或者系统 I/O 与外部设备进行信息交互,可以由外部设备控制运行。
机器人工作模式通过控制器面板上的切换开关进行切换,如下图所示。示教器状态栏显示当前工作模式。
动作模式
动作模式的分类
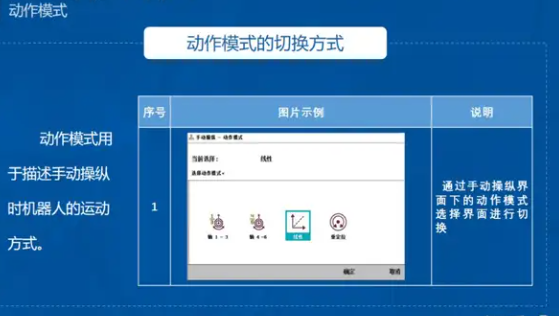
动作模式用于描述手动操纵时机器人的运动方式,动作模式分为 3 种,见下表。

动作模式的切换方式
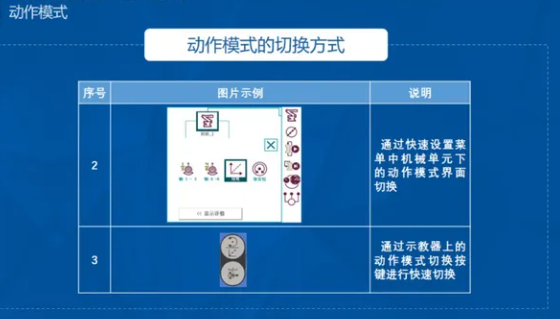
动作模式有 3 种切换方式,见下表。
了解更多ABB机器人
文章来源网络,如有侵权请联系删除